Finding URDF Files
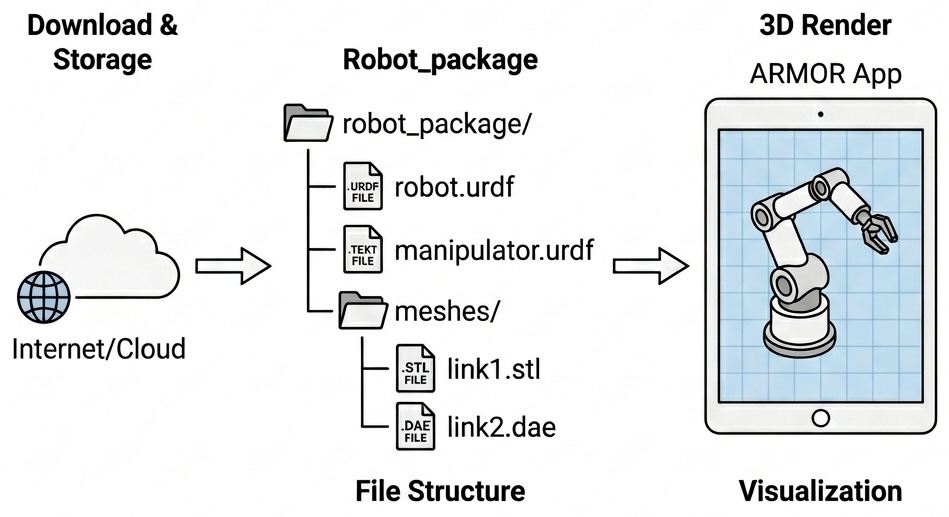
Building a highly accurate 3D robotic model with precise physical constraints and mass inertia from scratch is exceptionally difficult. Rather than modeling the kinematics entirely from the ground up, the most reliable and efficient way to start prototyping in ARMOR is by downloading an established, professionally documented URDF (Unified Robot Description Format) file.
Since almost all robot controllers and simulation software platforms standardize around this format, the internet is filled with deeply accurate robotic topologies — ranging from classic open-source bipeds to commercial 6-DOF industrial manipulators.
This guide explores the three best ecosystems for sourcing reliable URDF directories to load into ARMOR.
1. Downloading and Loading from GitHub
Regardless of where you source your URDF from, nine times out of ten it will be hosted inside a centralized GitHub repository.
[!WARNING] Because URDF XML files are inherently linked to secondary asset files (like
<mesh>tags pointing to.stl,.obj, or.daegeometries), you cannot simply download the standalone.urdftext file. The robot will fail to render recursively because its 3D assets are missing!
Instead of downloading single files, you must download the entire repository folder (e.g., using GitHub’s Download ZIP button or git clone).
Once the full nested folder structure is downloaded locally to your iPad or Mac:
- Navigate back to the ARMOR Loading URDF Files menu.
- Select the specific sub-folder inside the downloaded repository that uniquely contains your target robot’s assets.
- Note: You can alternatively just select the massive root repository folder itself, though ARMOR will take significantly longer to deep-search the entire hierarchy looking for valid geometry connections.
2. Official Robot Vendors (Commercial)
The absolute highest-quality URDFs come straight from the manufacturer’s engineering divisions. These files are typically heavily optimized for physics engines like MuJoCo and natively designed for ROS (Robot Operating System) node integration.
- Universal Robots (UR3, UR5, UR10): The official Universal_Robots_ROS2_Description repository contains the absolute standard URDF/Xacro templates used across industrial factory simulators natively.
- Boston Dynamics Spot: While Boston Dynamics hosts an official SDK, deeply optimized MuJoCo simulation ports of the Spot quadruped URDF format can be instantly procured from community aggregators (see MuJoCo Menagerie below) ensuring flawless leg-joint collision physics.
- Franka Emika Panda: The highly utilized Panda 7-DOF arm’s underlying kinematic topology can be cloned directly from their franka_ros GitHub footprint.
3. Software Simulation Environments
Before reaching hardware, engineers design control algorithms inside high-fidelity math simulations. Because these engines require extreme precision, their supporting open-source repositories often act as “jackpots” for discovering highly-tuned, commercial-tier URDF collections.
- MuJoCo Menagerie: By far the highest quality curation available online. Maintained officially by Google DeepMind, mujoco_menagerie meticulously curates over a dozen robots directly converted into MuJoCo’s MJCF and standard URDFs—including the ANYmal quadruped, the Unitree series, Google Barkour, and the Agility Cassie biped.
- Matlab & MIT Drake: Both the MathWorks Robotics System Toolbox and Massachusetts Institute of Technology’s Drake physics simulation framework host incredibly robust nested examples of both industrial and academic URDF environments ready to be imported mathematically.
4. Open-Source Aggregators
If you aren’t looking for a specific commercial arm but just want to deeply explore dozens of wildly different geometric setups, robotic enthusiasts maintain staggering aggregations online.
robot_descriptions.py: A massive Python aggregator project on GitHub (robot_descriptions.py) that actively hosts 175+ robotic descriptions. You can browse its expansive gallery for everything from humanoid platforms to planetary rovers, all guaranteed to load safely into Pinocchio or standard URDF parsers!urdf_files_dataset: Legacy monolithic dataset dumps like Daniella1/urdf_files_dataset are incredibly useful repos that aggregate dozens of raw XML/mesh topologies into a single massive index.
Once downloaded, these mega-datasets are structurally perfect for dropping straight into ARMOR’s hierarchical folder reader!
5. Popular Robot URDFs to Try in ARMOR
Not sure where to start? These are popular, well-documented robot URDFs that load and simulate beautifully in ARMOR — each shown here rendered in augmented reality on an iPhone (tap any image to enlarge):
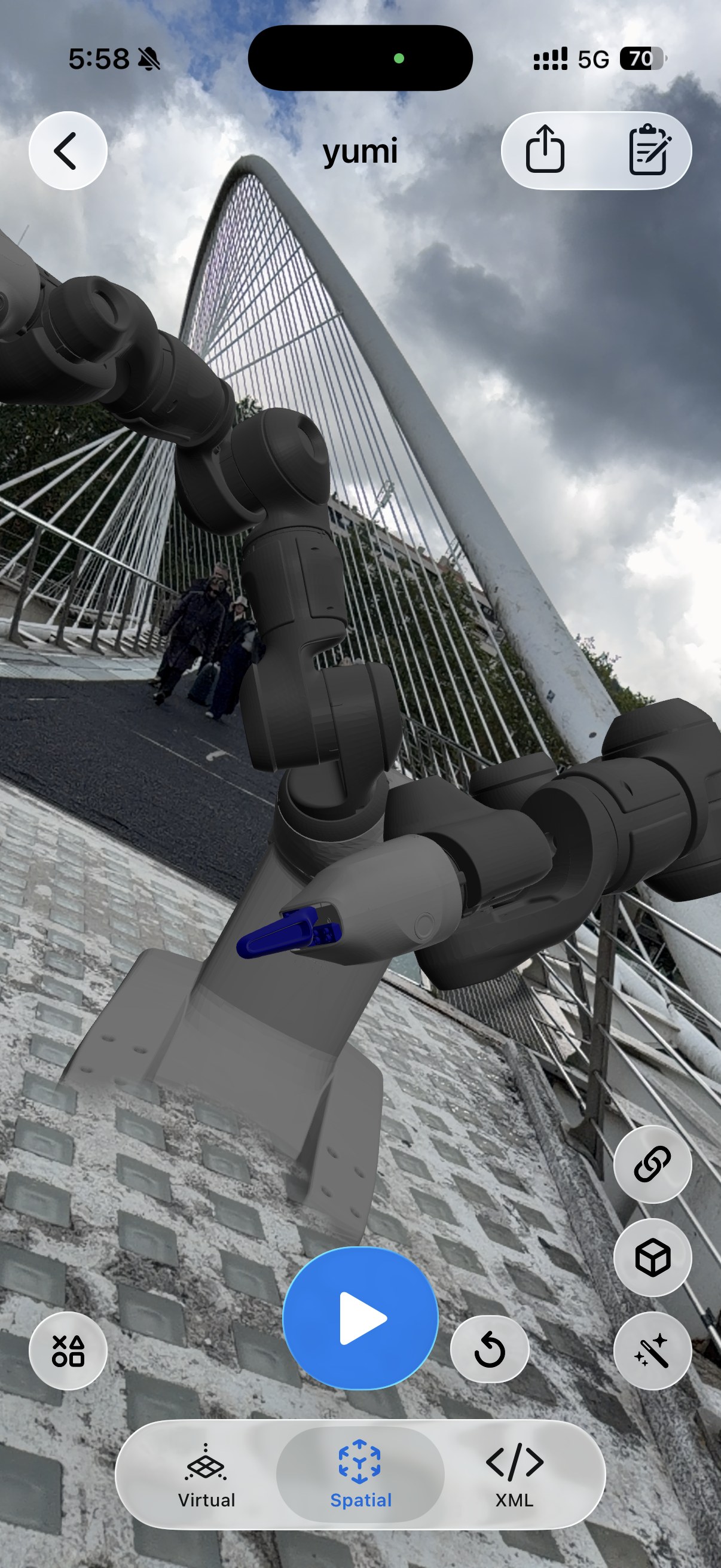
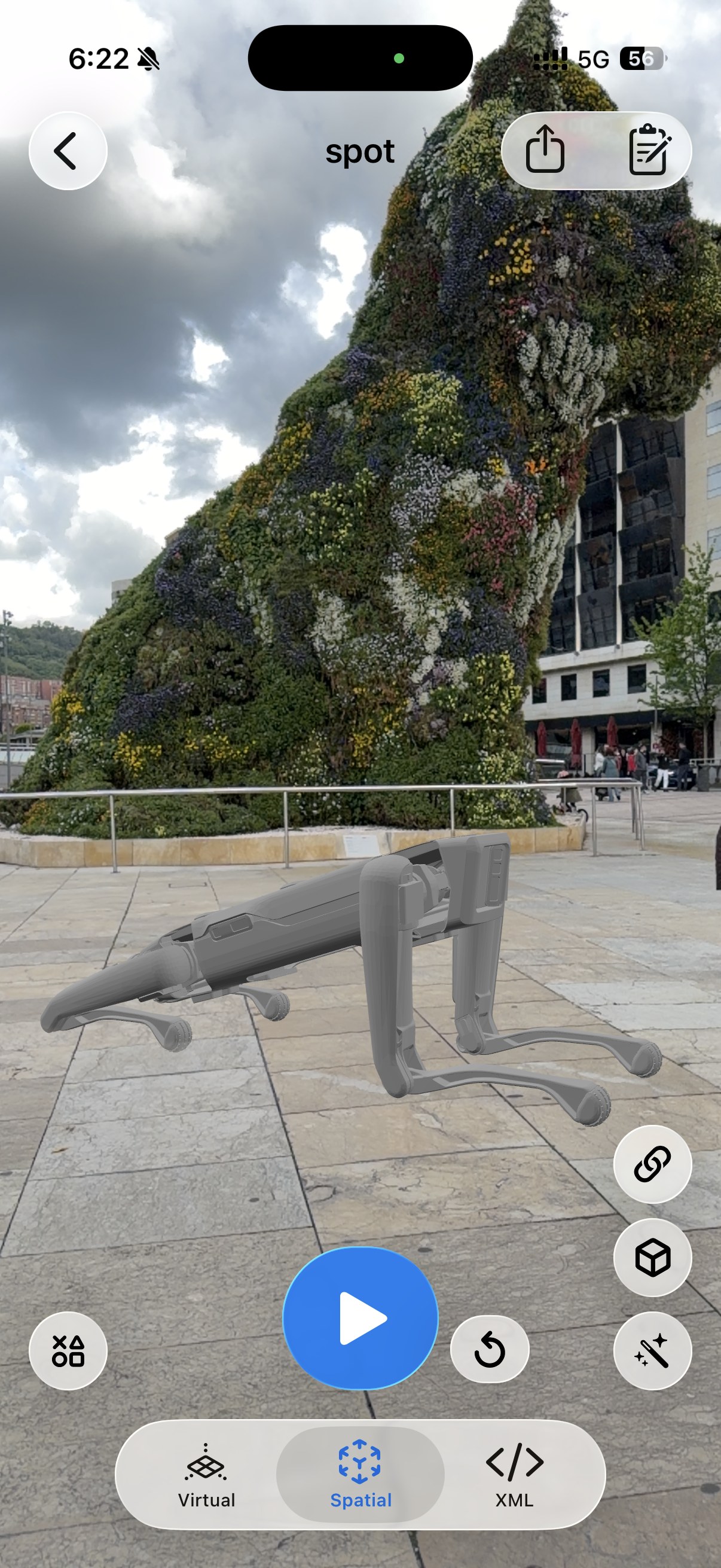
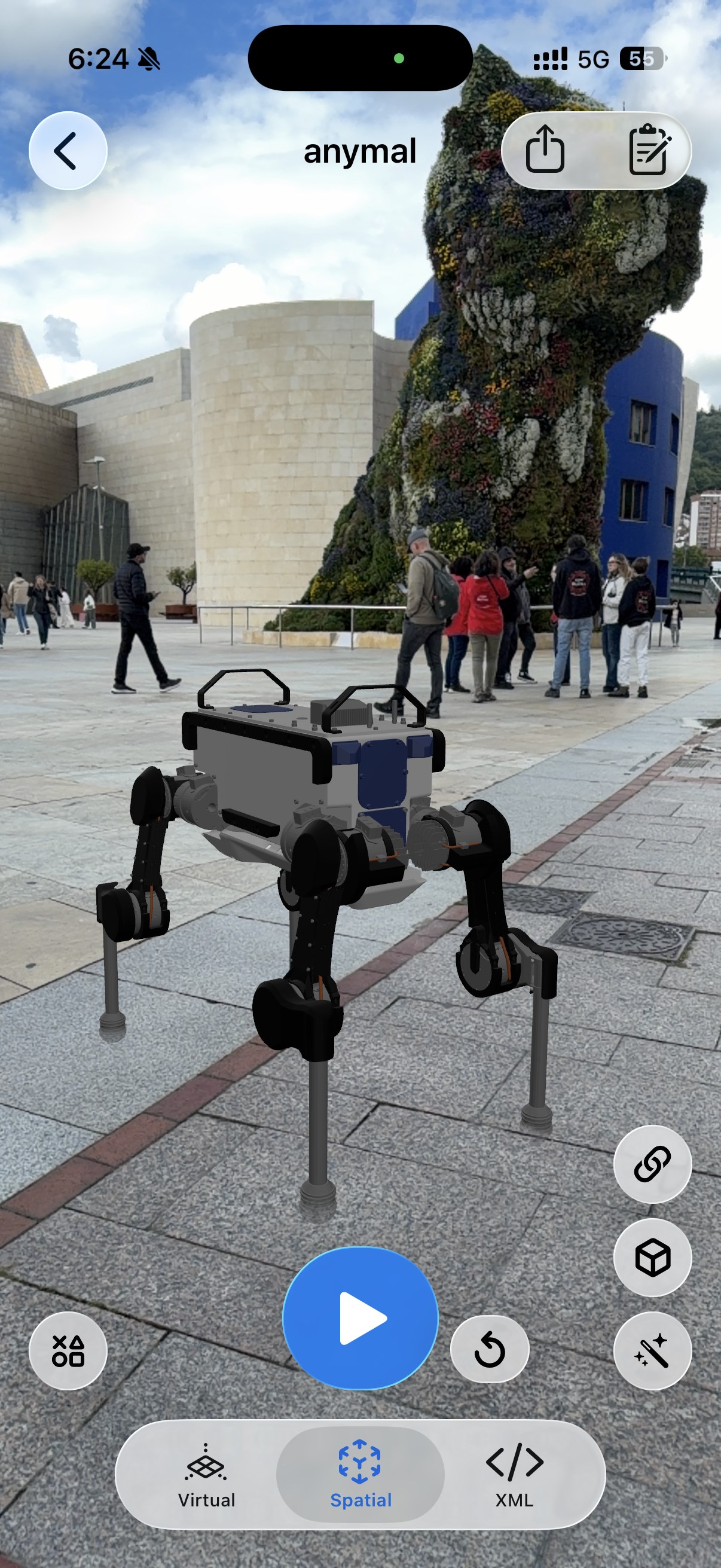
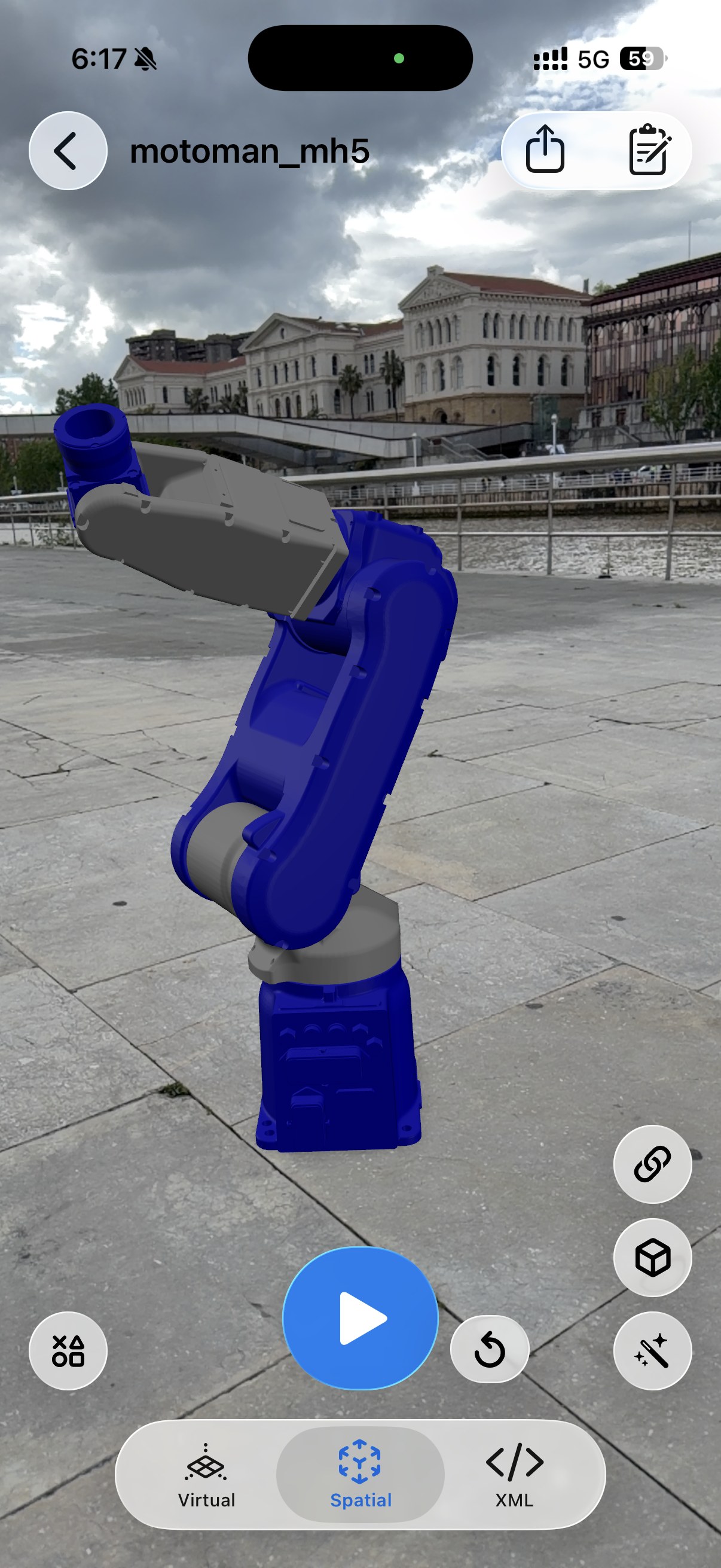


The industrial arms above (Motoman MH5, ABB IRB 6640, FANUC LR Mate 200iB) come from the ROS-Industrial repositories and the urdf_files_dataset; ANYmal is in the MuJoCo Menagerie and Spot in the urdf_files_dataset (oems subdirectory). Also great to try: the Reachy Mini (video), Boston Dynamics Atlas, Unitree G1/H1/Go2, and the Franka Emika Panda and Universal Robots UR5 arms.
Open in ARMOR: download any of the above, then follow Loading URDF Files to import the folder. New to the app? Start with Getting Started, or download ARMOR on the App Store. For more robot demos, browse the video gallery and the blog.