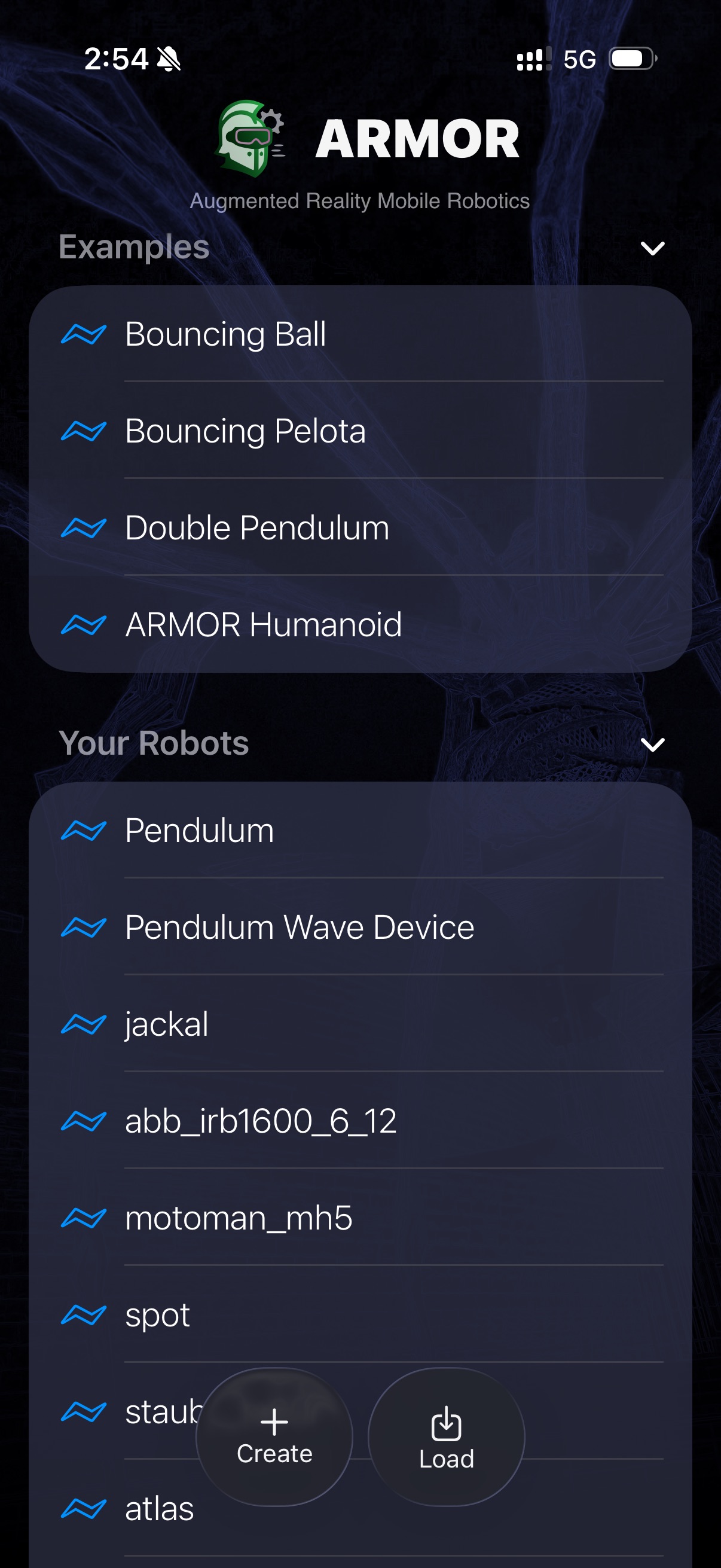
ARMOR
Augmented Reality Mobile Robotics
URDF Viewer, Editor & MuJoCo Simulator — no ROS required
URDF Viewer, Editor & MuJoCo Simulator — no ROS required
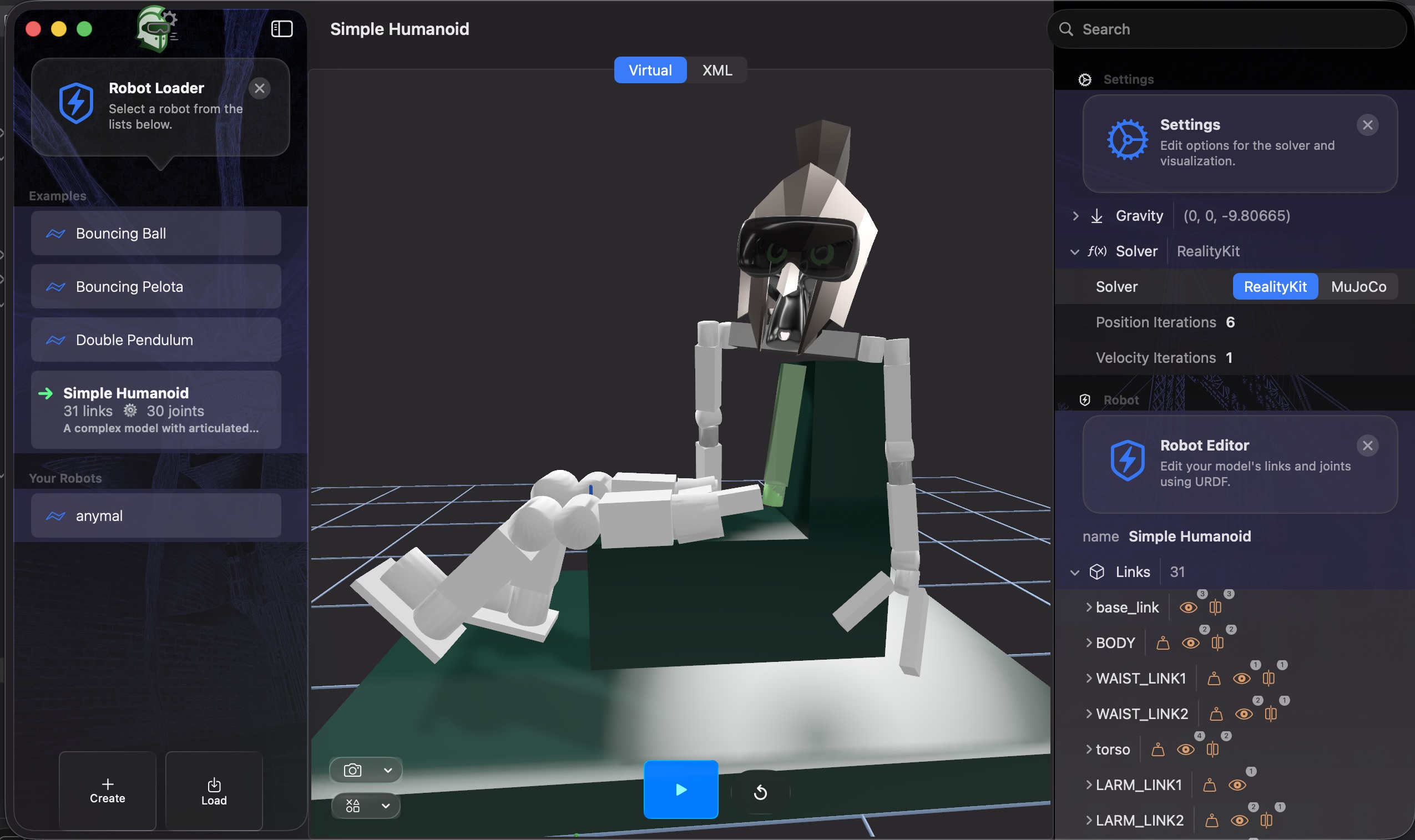
The industry-standard MuJoCo simulator runs natively on-device for realistic robot arm kinematics and joint physics. Learn more →
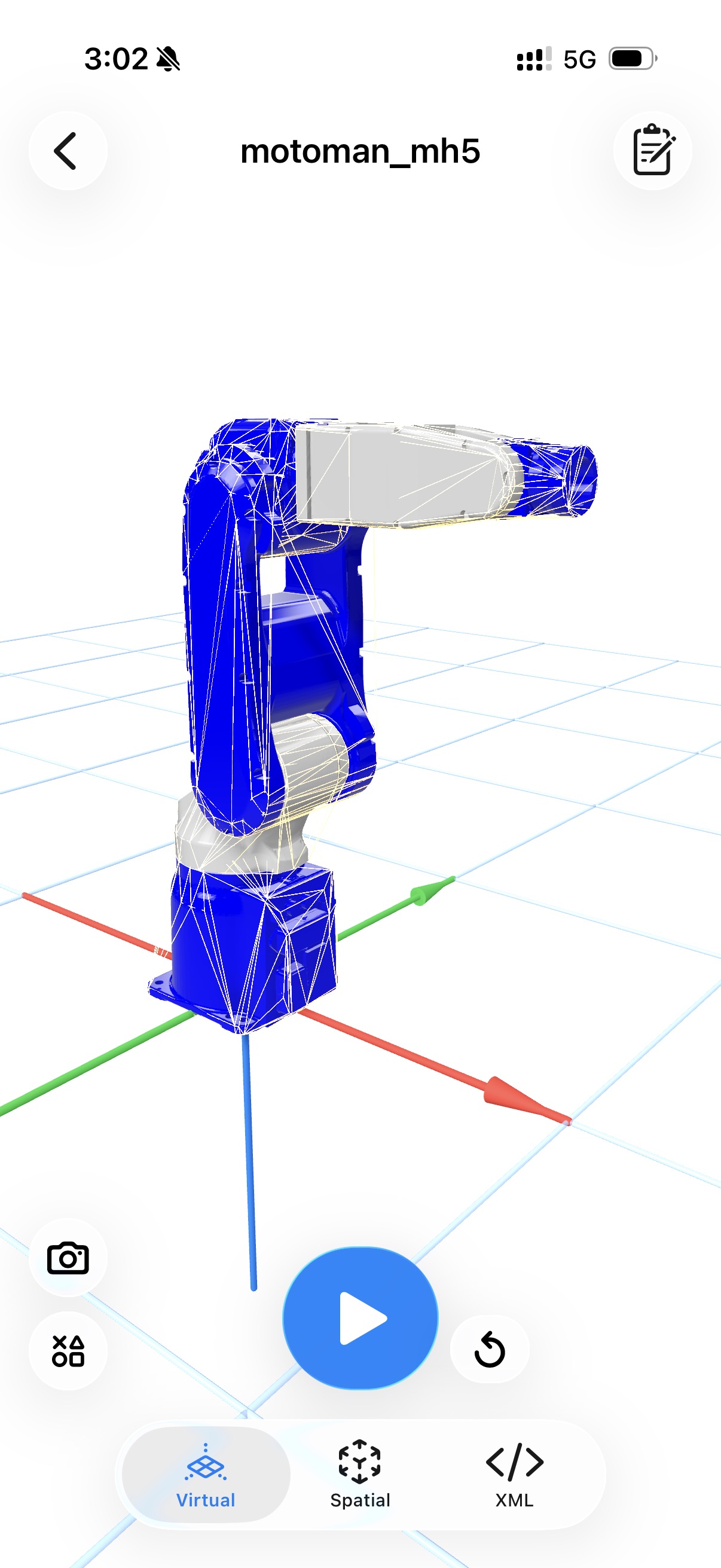
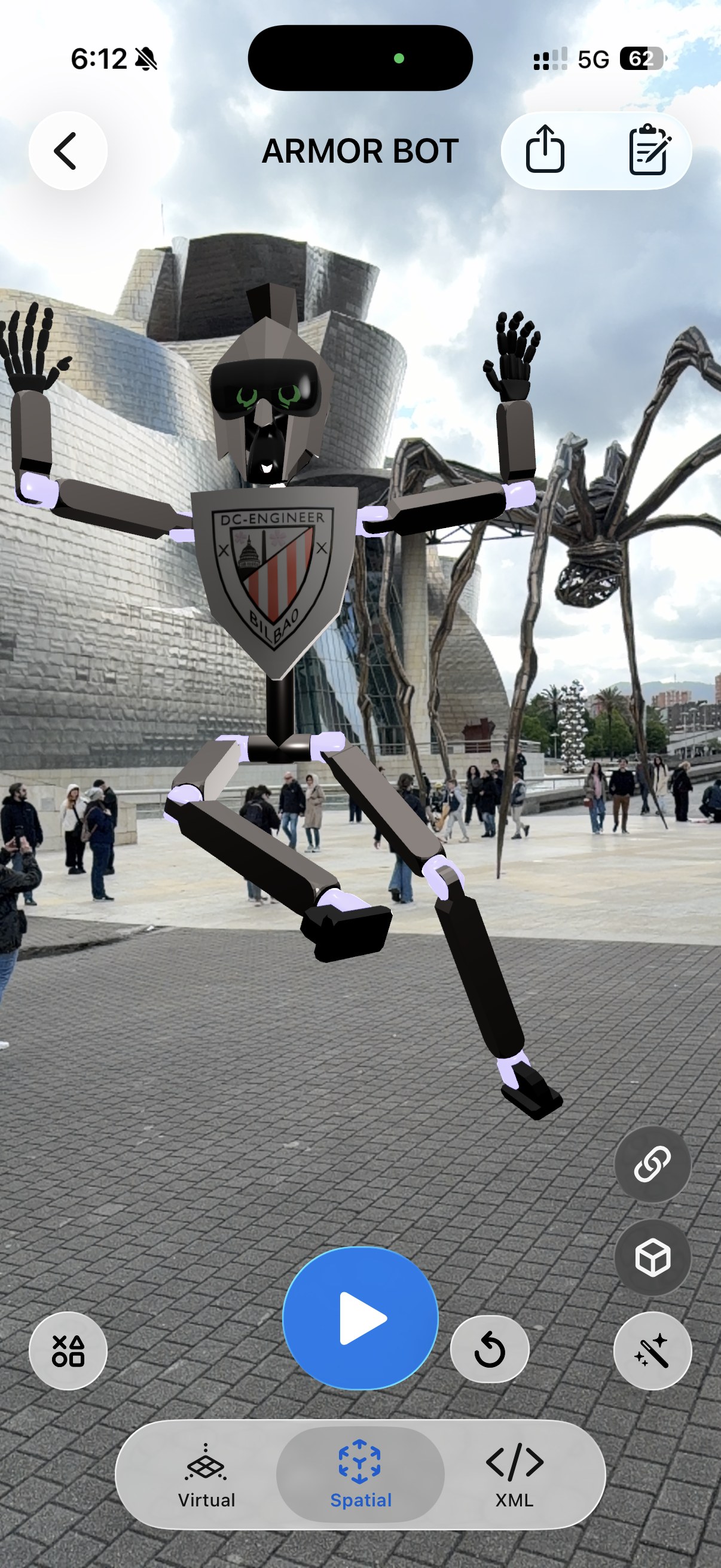
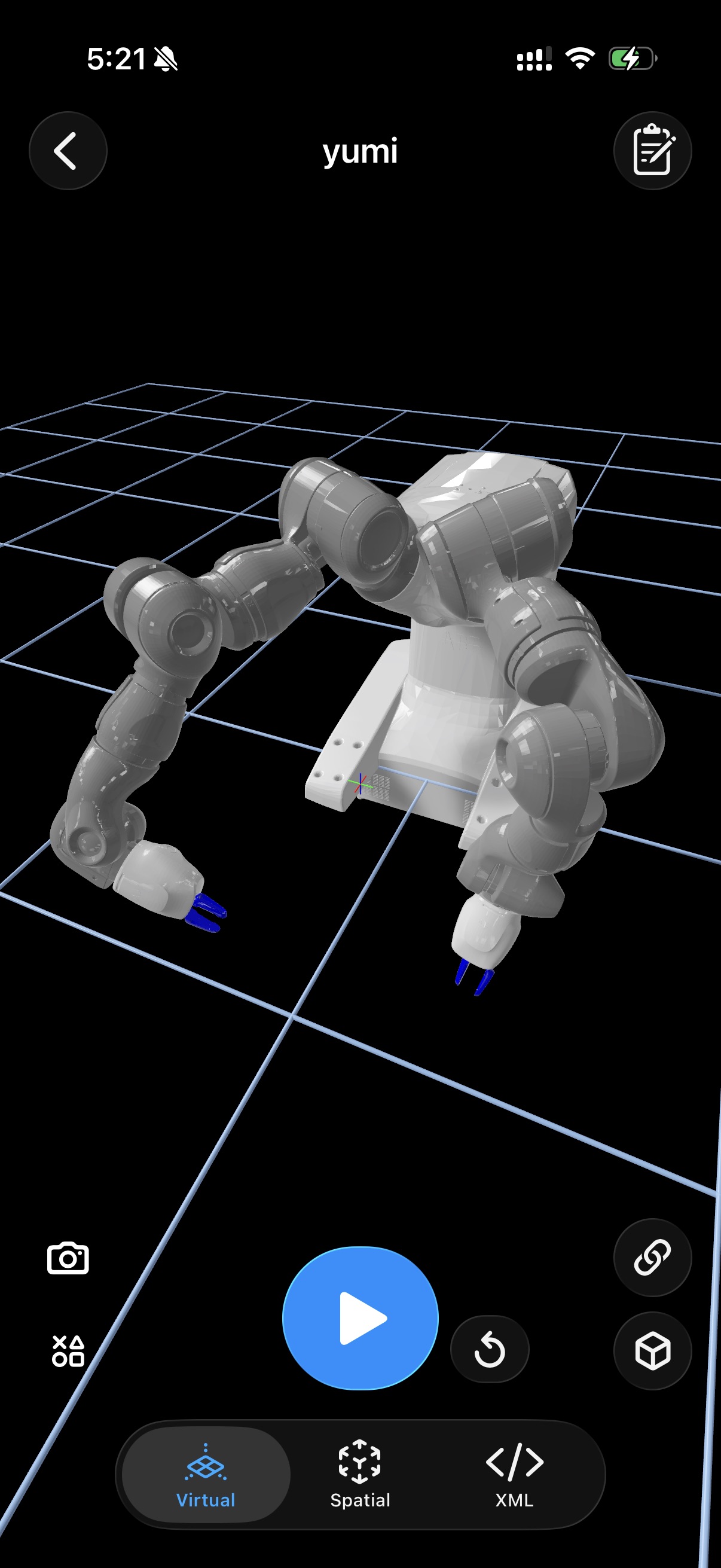
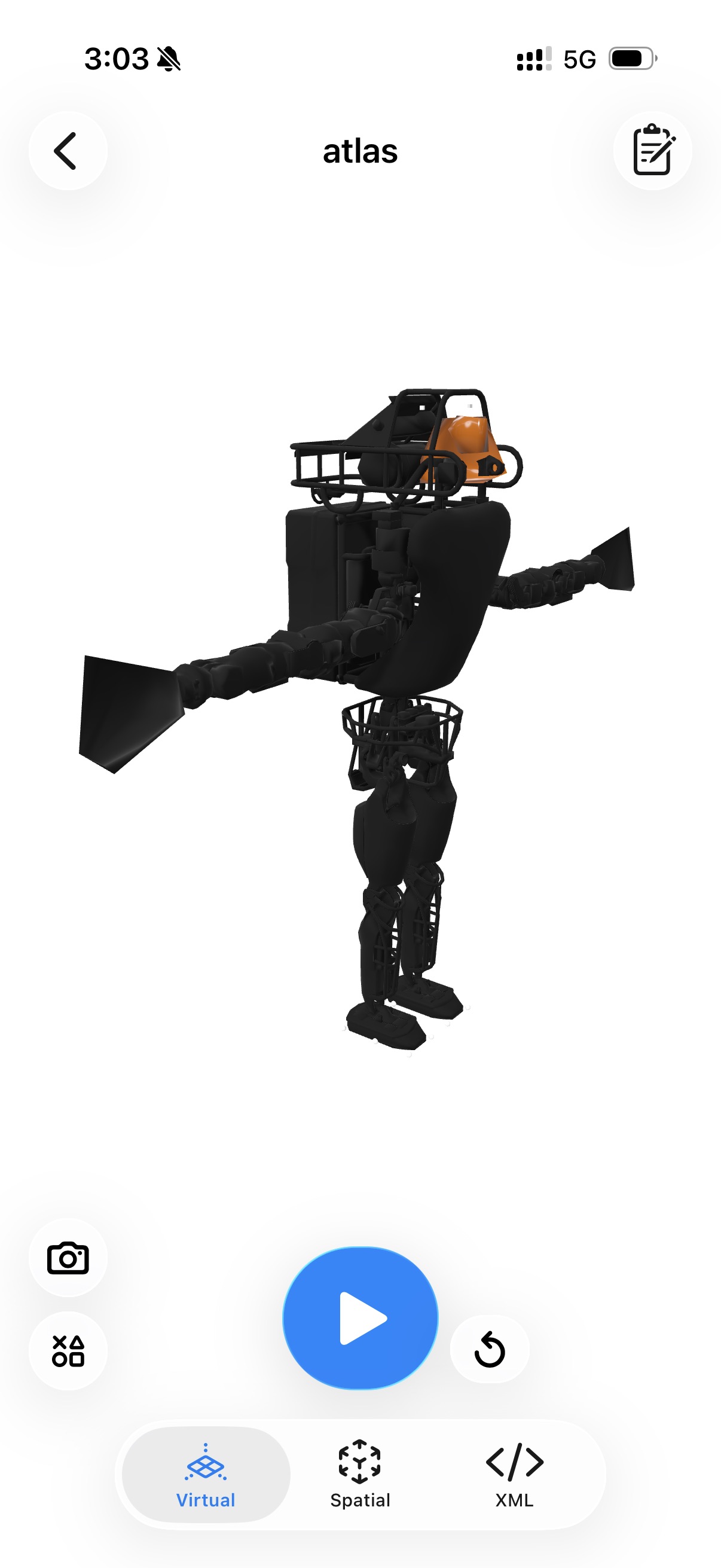
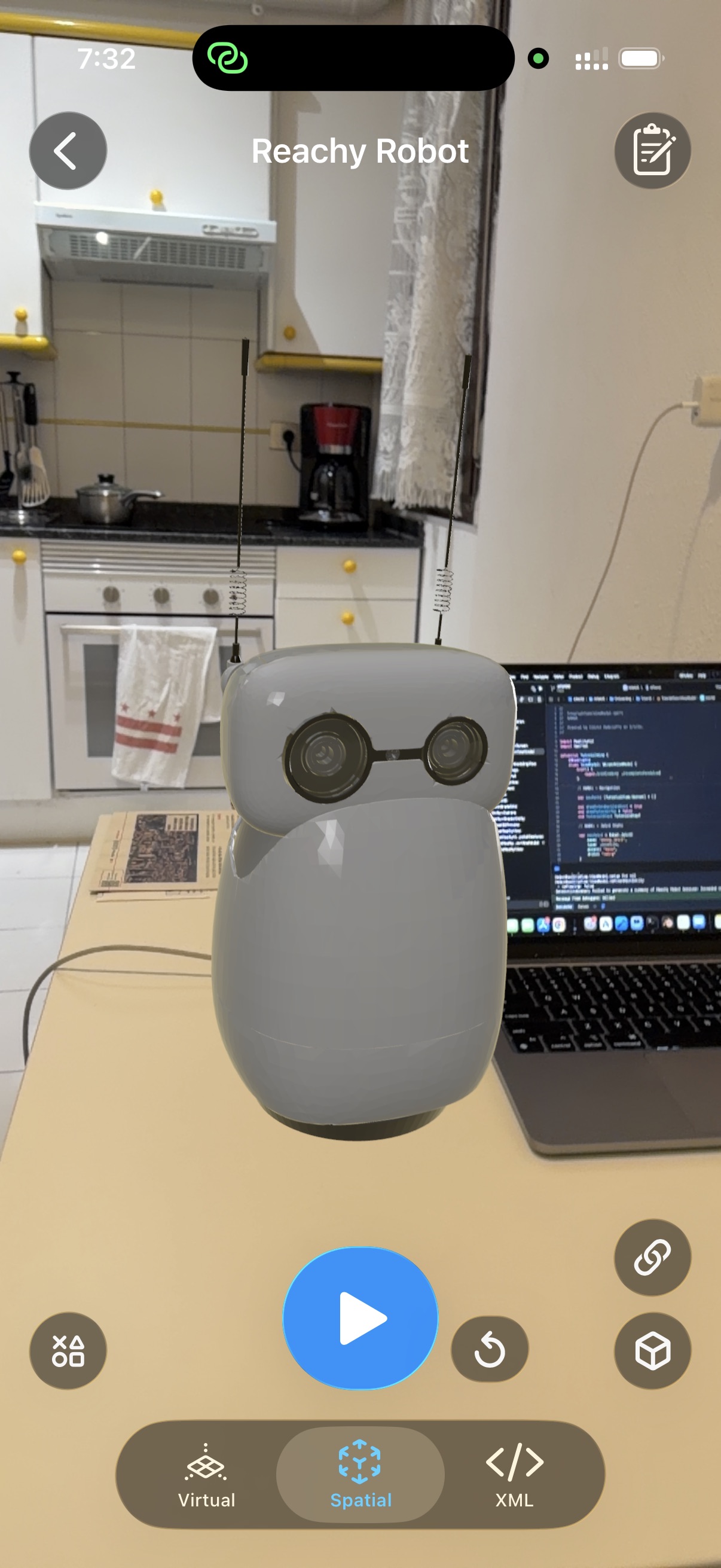
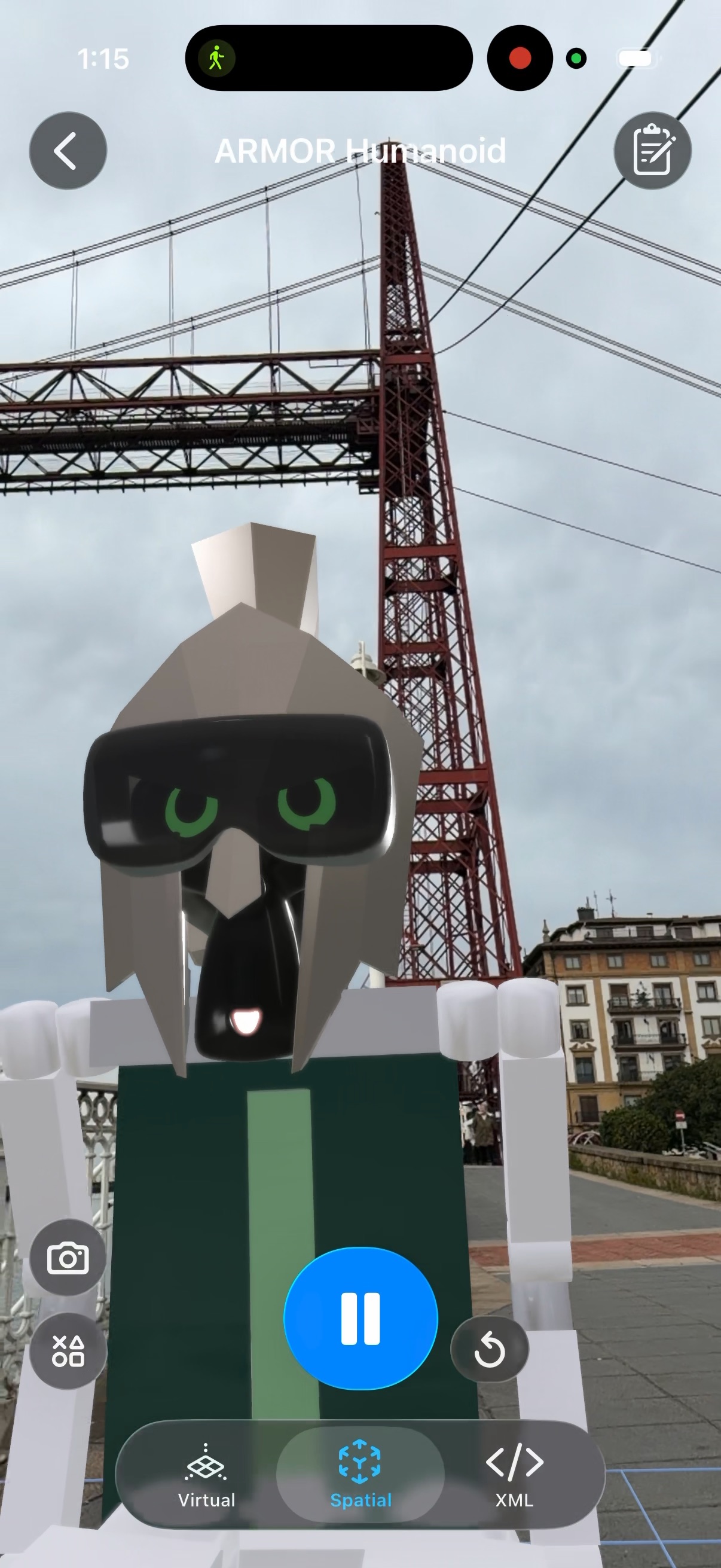
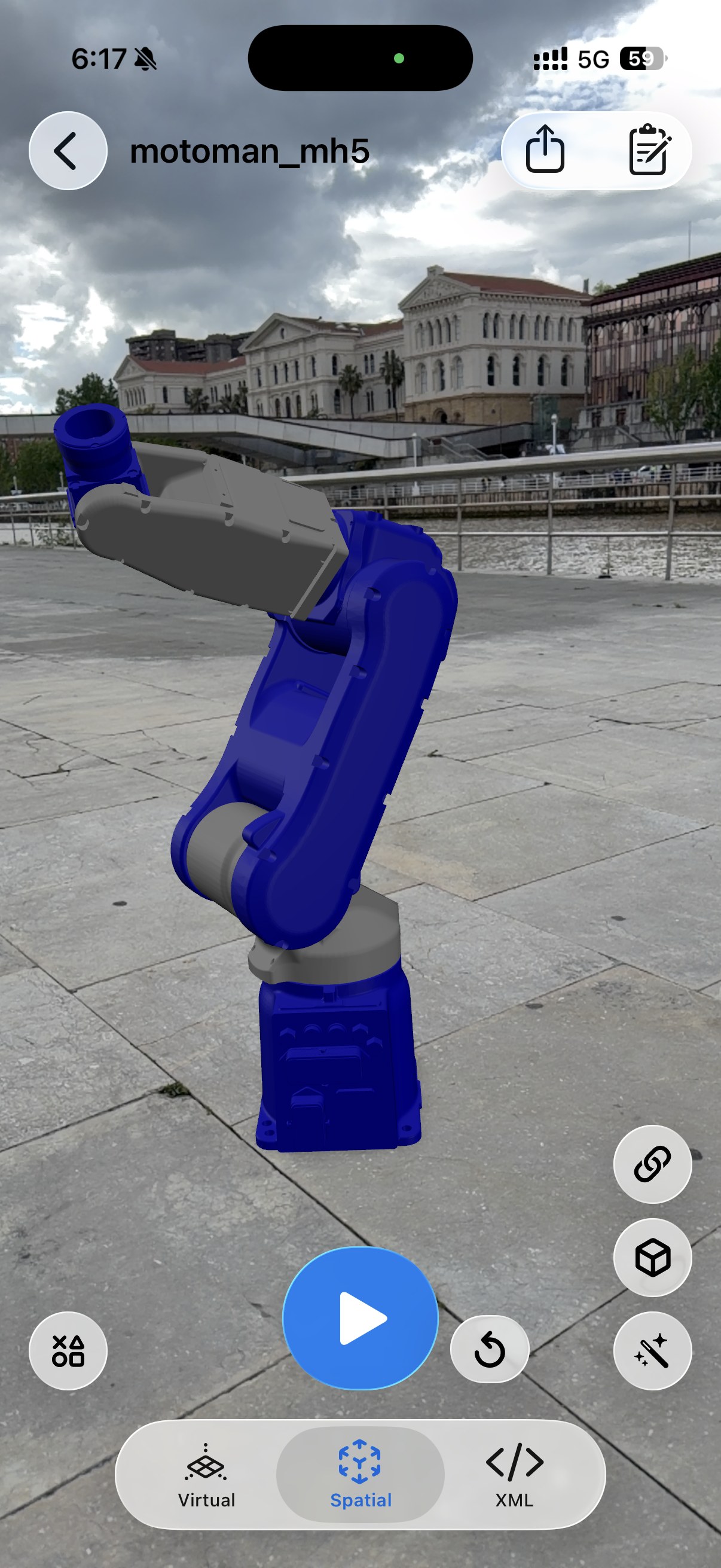
Visualize your URDF models in the real world with high-performance augmented reality robotics overlays.
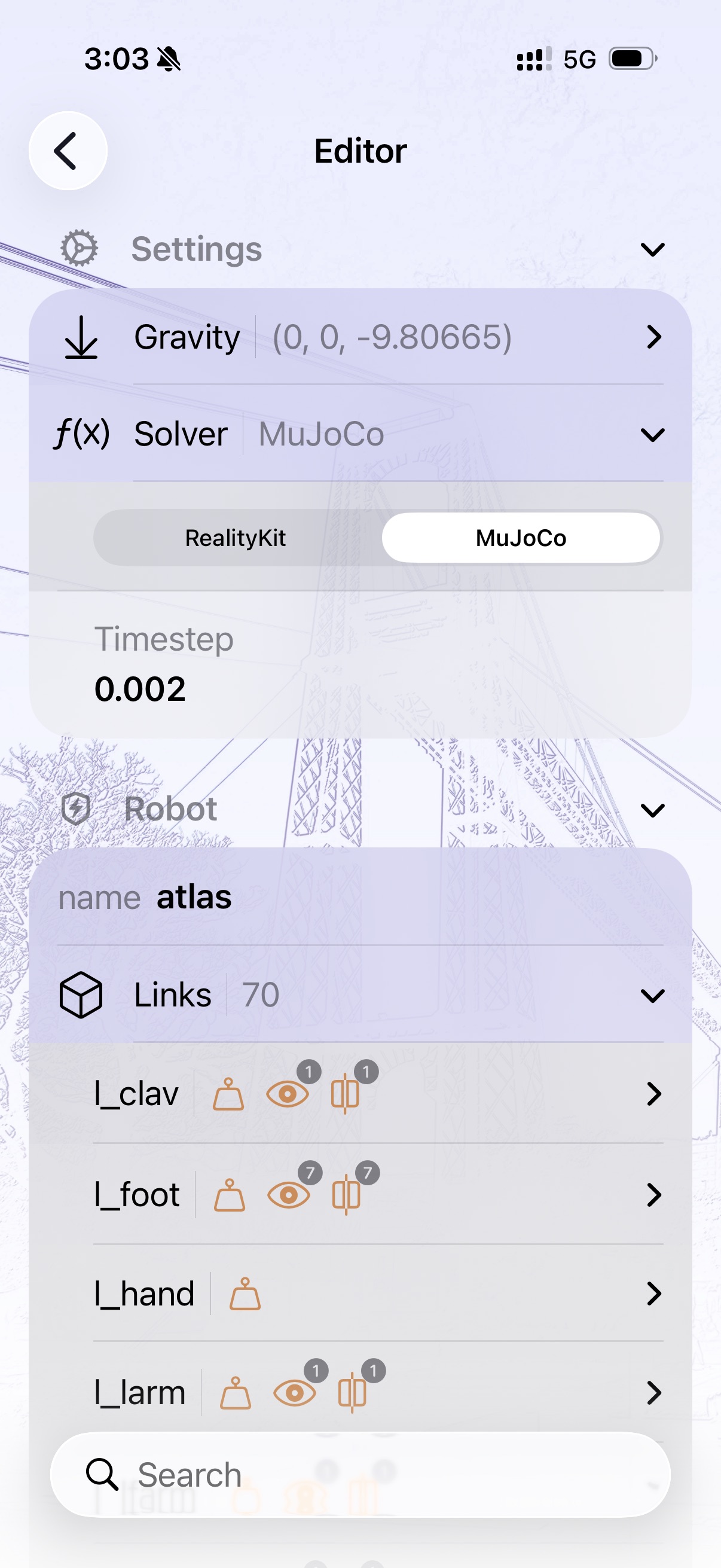
Modify robots safely using intuitive SwiftUI wizard forms, ensuring compliant and error-free URDF XML structures.
Bring your own robot — find URDF files to import from GitHub, robot vendors, and the MuJoCo Menagerie.
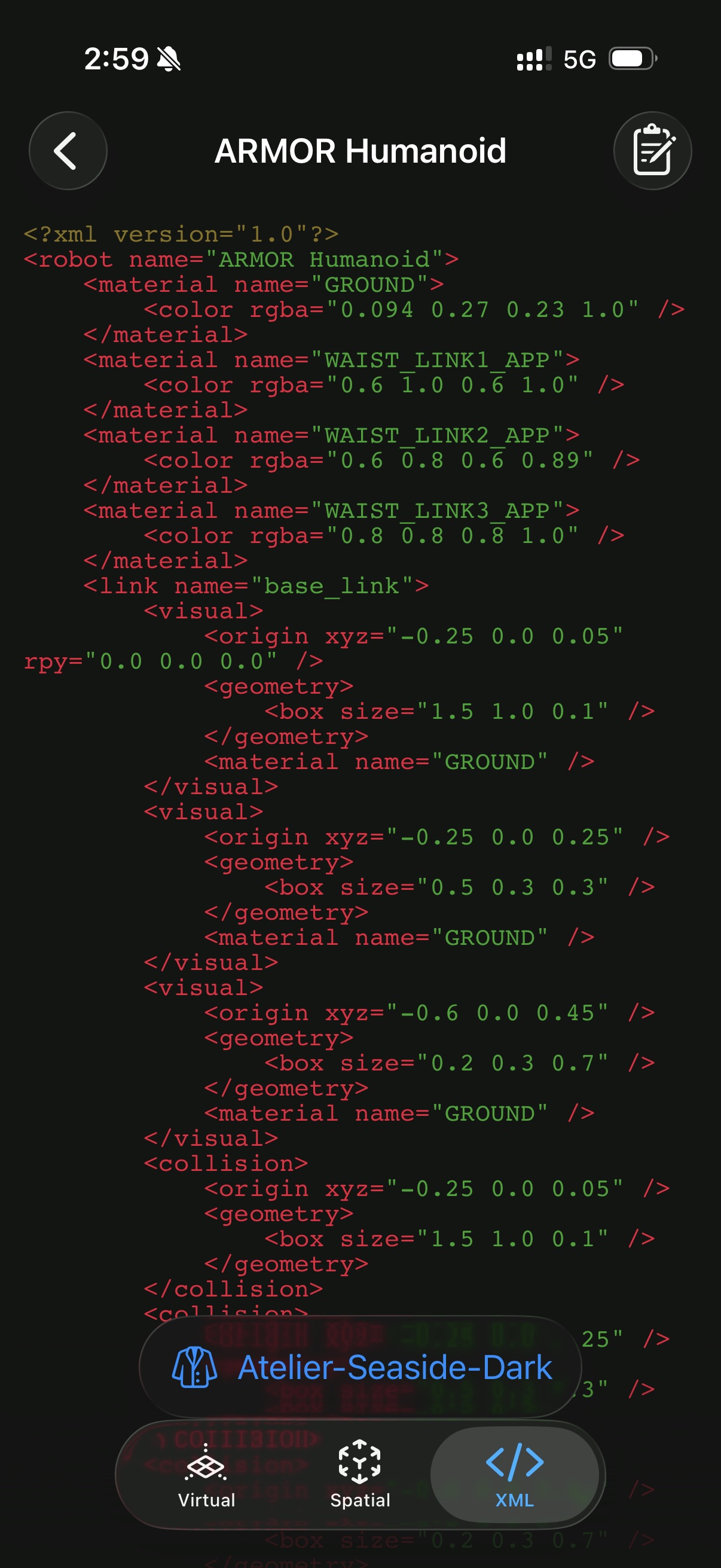



Everything you configure in the app — ground plane, obstacles, robot placement — exports as a ready-to-run MuJoCo MJCF and ROS-compatible URDF package. One pipeline, zero surprises.
Wrap your URDF robot in a full simulation world — gravity, timestep, ground plane, and obstacles — stored in SDF format, familiar to Gazebo and Drake users. Learn more →
Toggle contact physics with adjustable friction, add a checkerboard floor that mirrors MuJoCo's default appearance, and populate the scene with box, sphere, and cylinder obstacles that react to the robot. Ground plane →
The in-app MuJoCo simulation and the exported MJCF use the same build pipeline — correct fixed vs. free base, world context, and converted OBJ/STL meshes — so your robot behaves identically on-device and on the desktop. Export docs →
