MuJoCo Simulator for iPhone, iPad & Mac
ARMOR runs MuJoCo — Google DeepMind's industry-standard physics engine — natively on your device. Load a URDF and simulate robot arms and humanoids in real time, right in your hand. No ROS, no desktop, no setup.
The Bridge Between ROS, URDF & MuJoCo

Robotics runs on shared standards. ROS gives the field its tooling and conventions — including URDF, the common format that describes a robot's geometry and physics. MuJoCo imports URDF to deliver advanced multibody-dynamics simulation. ARMOR ties it together on your iPhone, iPad, or Mac: import a URDF, edit it on-device, simulate it with MuJoCo in real time, then export a project that drops straight into your desktop workflow. It's a mobile-first tool that fits the pipeline academics and professionals already use.
What is MuJoCo?
MuJoCo (Multi-Joint dynamics with Contact) is a high-performance physics engine developed by Google DeepMind. It is the modern standard for robotics research, reinforcement learning, and multibody dynamics, prized for fast and accurate simulation of joints, contacts, and constraints. Learn more at the official MuJoCo site.
A Real MuJoCo Simulator in Your Pocket
ARMOR doesn't stream or fake it — it runs the actual MuJoCo solver natively on iOS, iPadOS, and macOS, rendered through Apple's RealityKit. Robot models step forward in real time on the device, so you can iterate on dynamics anywhere.
- Native, real-time MuJoCo simulation on iPhone, iPad & Mac
- High-fidelity joint dynamics, contacts, and collisions
- Tune gravity, timestep, and solver settings on the fly
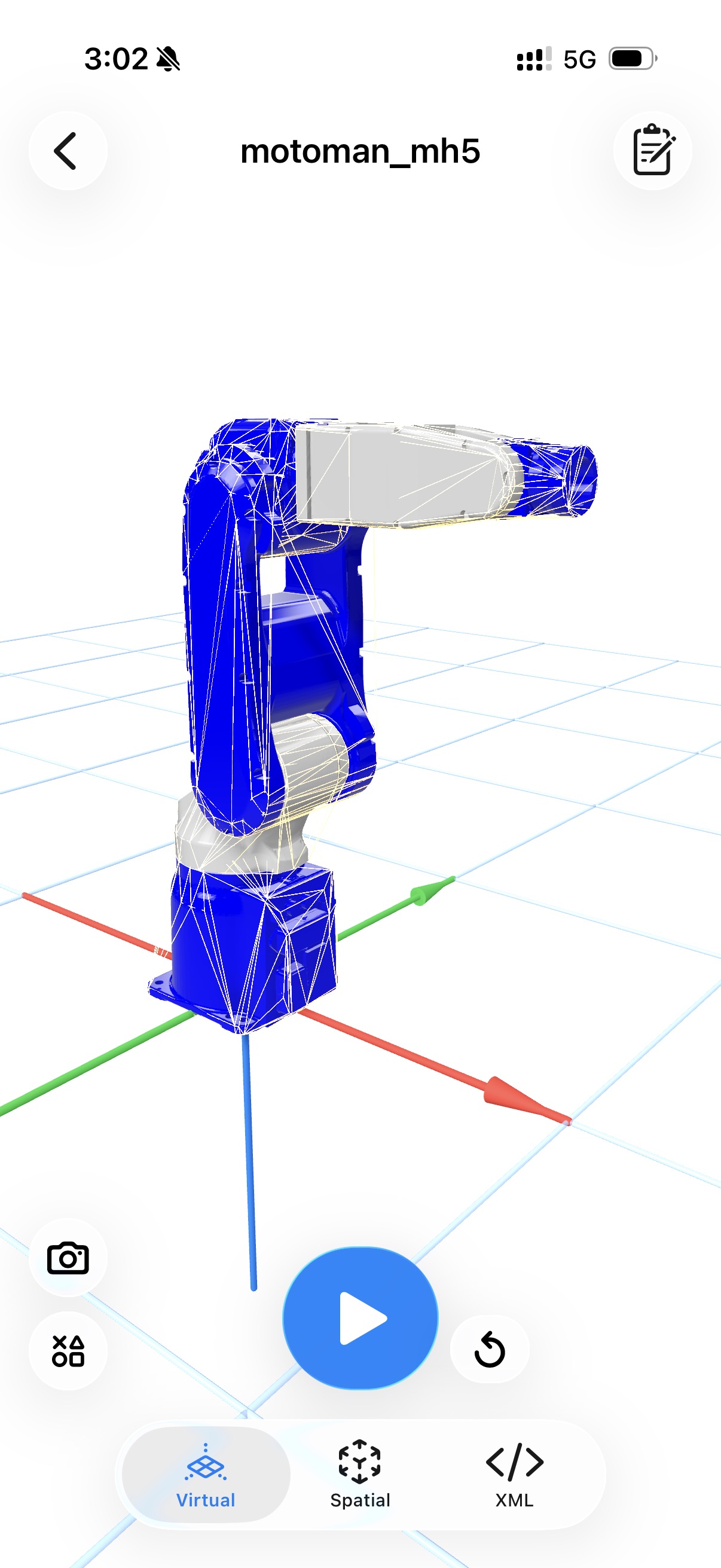
From URDF to MuJoCo in Seconds
ARMOR reads the same URDF robot descriptions used across ROS and desktop tooling, builds the model on-device, and hands it to the MuJoCo solver — no manual conversion required. When you're ready to move to the desktop, export an MJCF (MuJoCo) archive with all assets bundled and converted for you.
Don't have a model yet? Find URDF files to import from GitHub, robot vendors, and the MuJoCo Menagerie.
MuJoCo 3.9 — Same Engine as Your Desktop
ARMOR embeds MuJoCo 3.9 (via the open-source swift-mujoco fork), the same generation powering desktop MuJoCo today. The 3.x MjSpec model-editing API and mjs_attach scene-composition primitive are what make multi-robot worlds possible: ARMOR compiles each robot independently and attaches them into one composed scene with proper name-spacing — no fragile XML splicing.
The exported MJCF uses the same build pipeline as the on-device simulation. Ground plane, obstacles, multi-robot placement, scene lighting, and reflective floor are all embedded in the file, so it opens correctly in simulate or your own MuJoCo tooling without post-processing. Export docs →
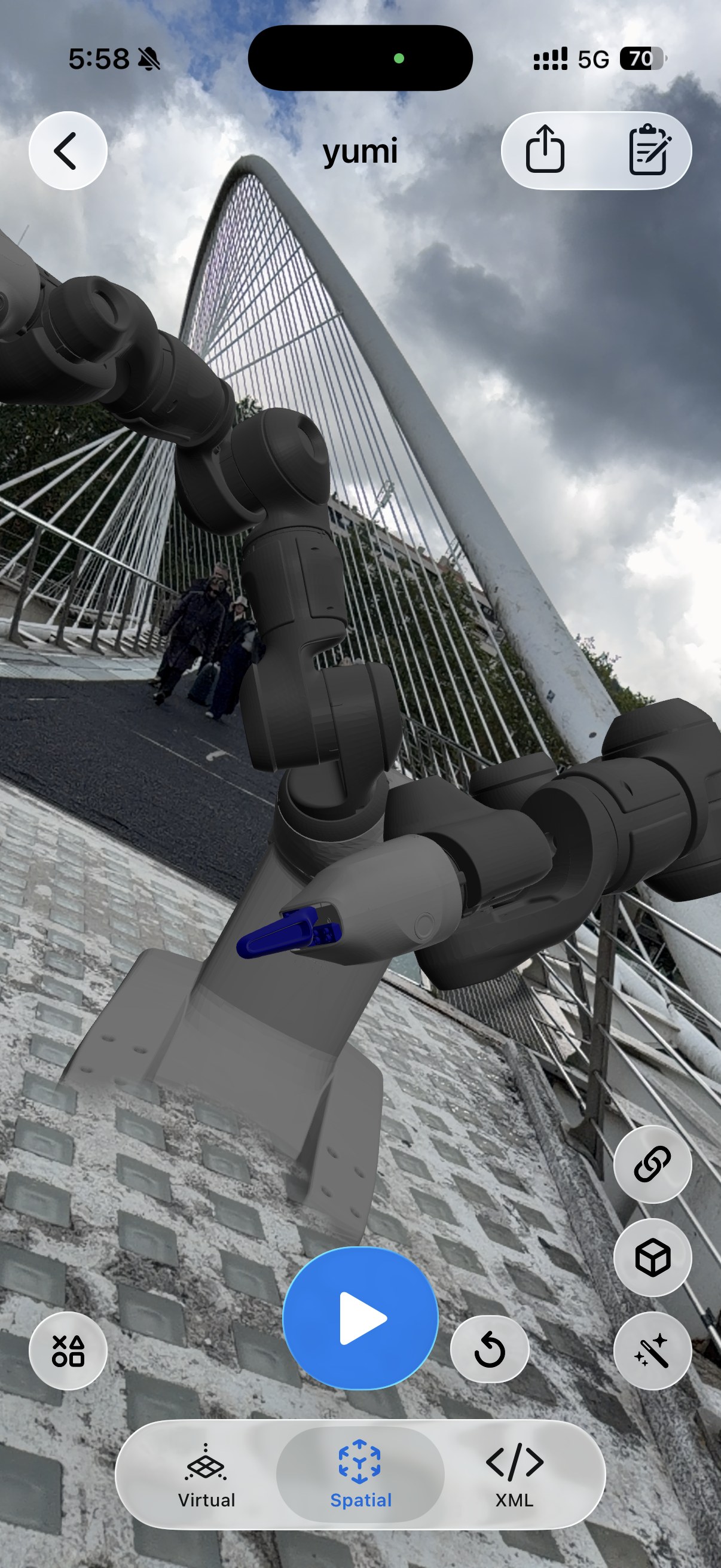
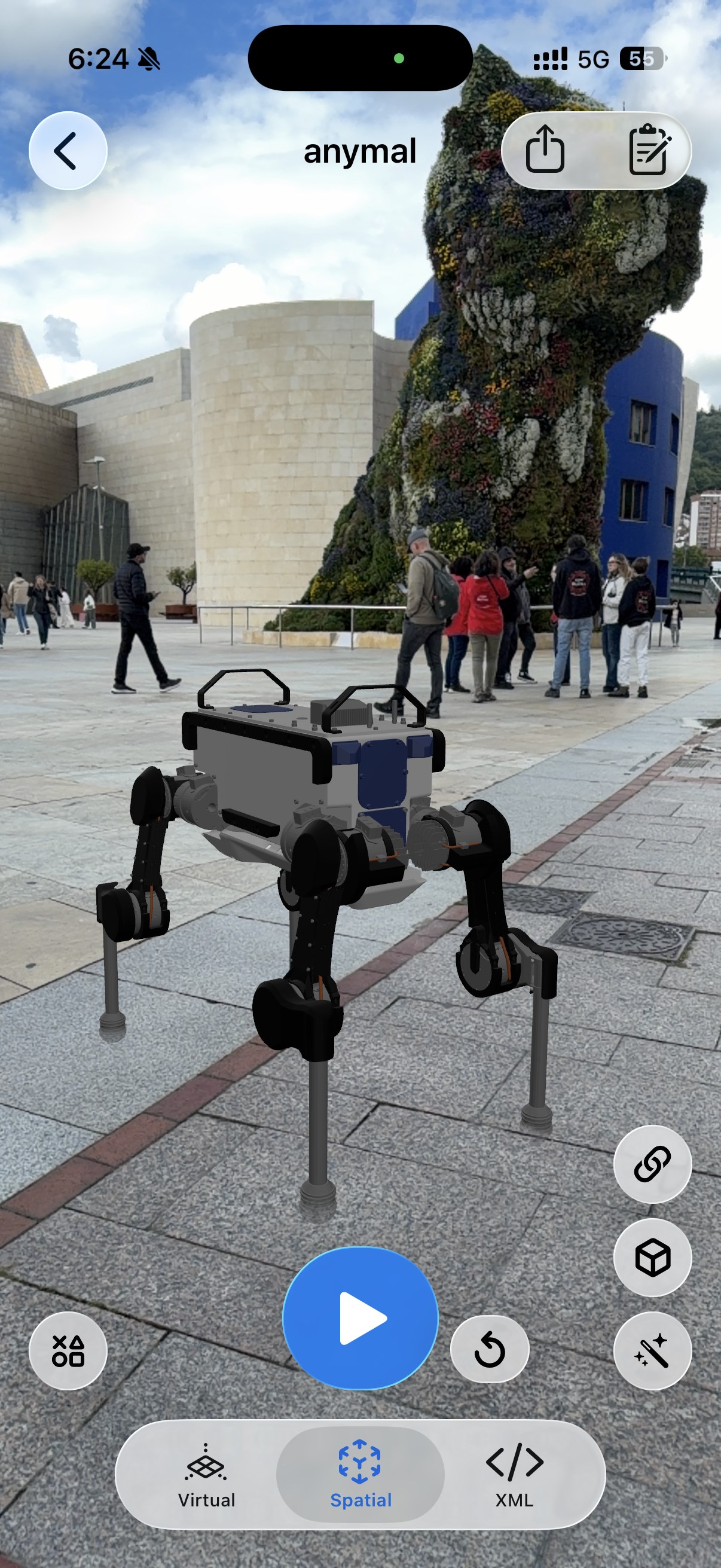

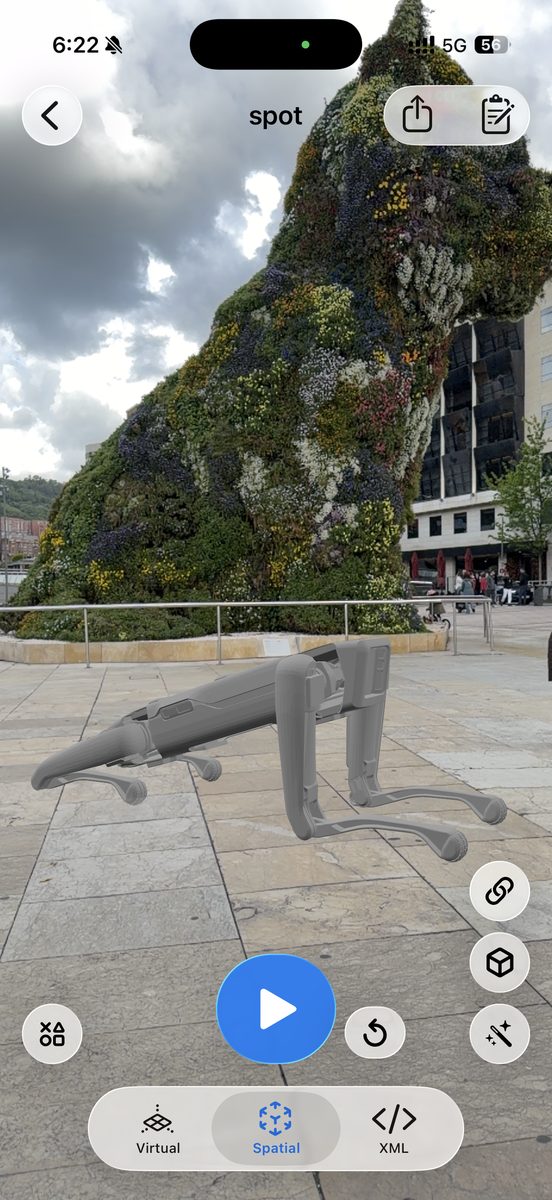
MuJoCo Simulation in Augmented Reality
Place your MuJoCo simulation in the real world. ARMOR's spatial reality mode overlays the running simulation on detected surfaces with real-world occlusion, so you can see your robot at true scale on your desk or floor.
Start Simulating with MuJoCo Today
Download ARMOR and run the MuJoCo simulator on your iPhone, iPad, or Mac — then explore the full feature set.